Demonstrating LEAP Hand v2:
Low-Cost, Easy-to-Assemble, High-Performance Hand for Robot Learning
Abstract
Replicating human-like dexterity in robotic hands has been a long-standing challenge in robotics. Recently, with the rise of robot learning and humanoids, the demand for dexterous robot hands to be reliable, affordable, and easy to reproduce has grown significantly. To address these needs, we present LEAP Hand v2, a $200 8-DOF highly dexterous robotic hand designed for robot learning research. It is strong yet compliant, using a hybrid rigid-soft structure that is very durable. Its universal dexterous MCP joint provides exceptional finger mobility, enabling a variety of different grasps. The parts are all 3D printed and can be assembled very easily in under two hours using our instructions. Importantly, we offer a suite of advanced opensource software tools to support robot learning research. This includes human video retargeting code from MANO and Vision Pro, motion capture teleoperation code using the Manus Glove, and a URDF with simulation examples for various simulation engines. We will showcase LEAP Hand v2—designed specifically for this demonstration—alongside our previous robot hands with real robot interactive demos. Following our successful demos at RSS 2023 and 2024, we will again offer an engaging opportunity for attendees to get hands-on experience and information about the accessibility of low-cost, open-source robotic hands.
Accurate Teleoperation with Gloves
Dining Tray
Hang Shirt
Grape Pluck
Hybrid Rigid-Soft Hand
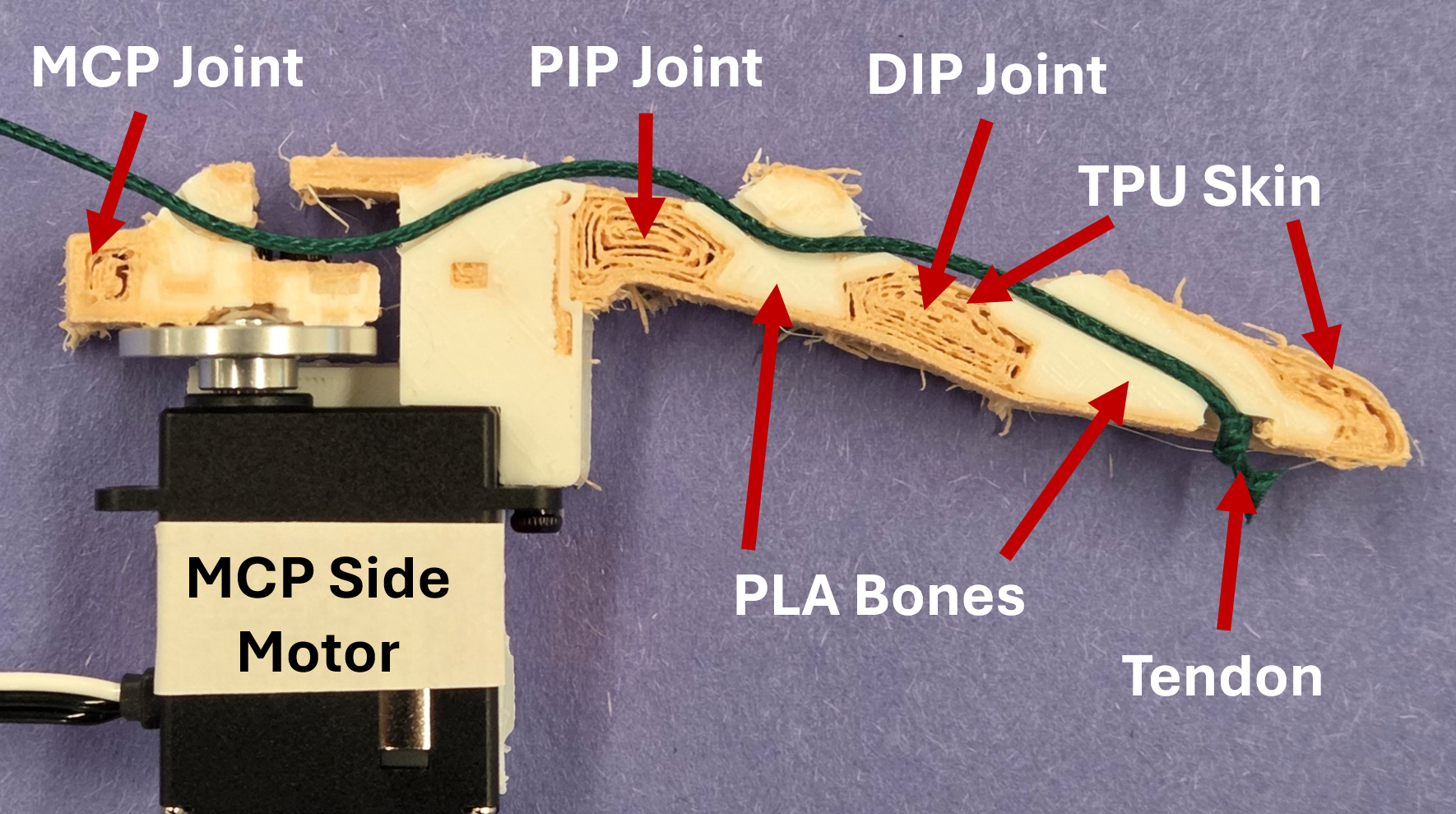
The hybrid rigid-soft design provides both strength and durable compliance.
The interior of the fingers have a strong rigid structure, while the soft joints are actuated via a single tendon.
Each finger is easily multi-material 3D printed with TPU and PLA.
Under-actuated Curling
The MCP bends most, followed by the PIP and DIP.
Softer rubber at earlier joints makes them actuate more.
Pinches can be performed between the thumb and
all three under-actuated fingers.
Dexterous MCP Side Joint
The signature LEAP Hand MCP joint enables incredible dexterity side to side. In total LEAP Hand v2 has 16 DOF with 8 powered motors.
One Piece Palm and Fingers
Flat Fingers Top Mount
Round Fingers Wrist Mount
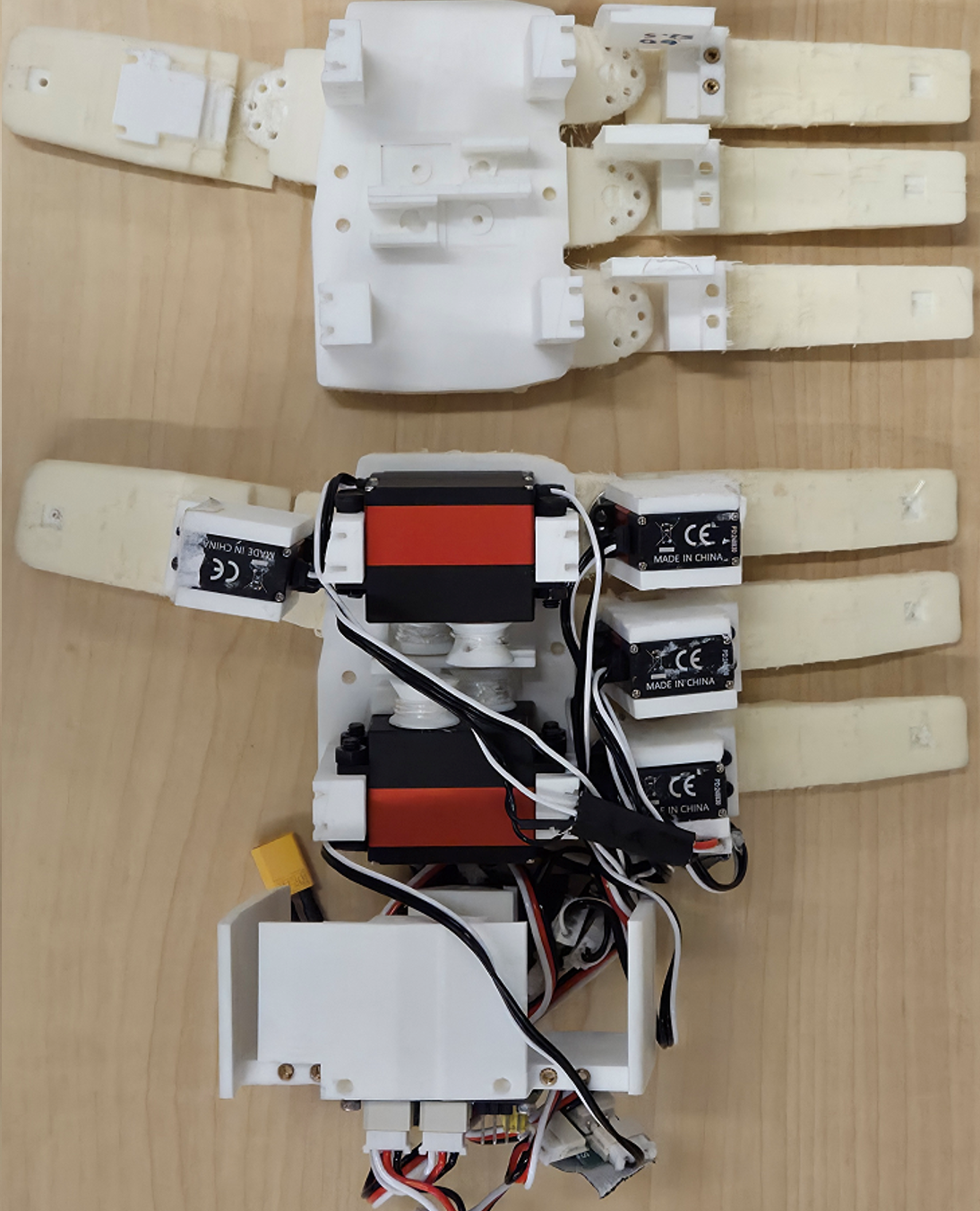
The palm and fingers are each single 3D-printed pieces making fabrication, assembly and customization extremely easy!
Human-like Kinematics and Weight
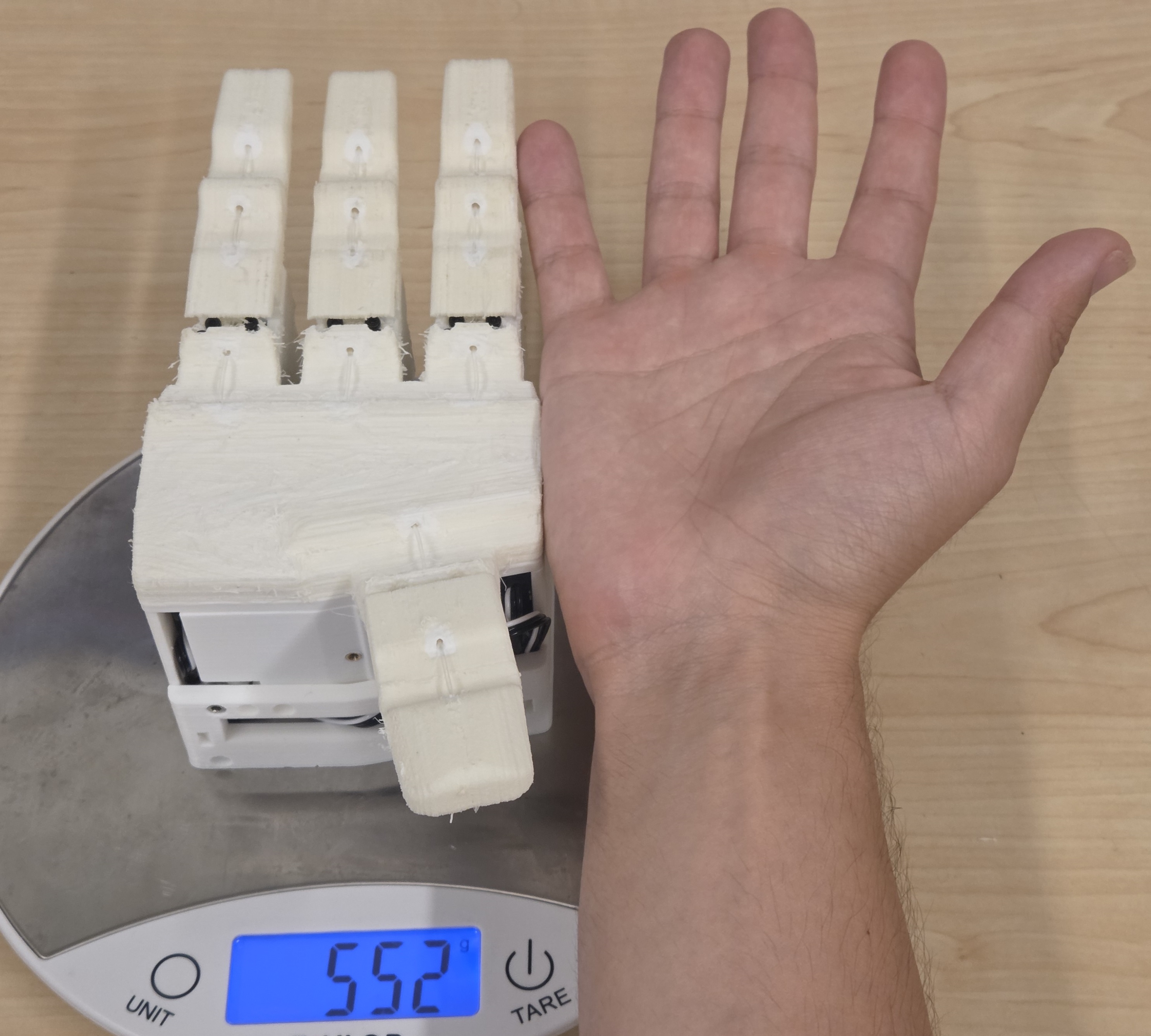
LEAP Hand v2 is similar in size to a human-hand. It can mount gripper-style or wrist-style to many different robot arms.
The MCP bends most, followed by the PIP and DIP.
Softer rubber at earlier joints makes them actuate more.
Pinches can be performed between the thumb and
all three under-actuated fingers.